Edge Detection Walkthrough Video Series
The following 9-part video series provides a step-by-step walkthrough of what is needed to take a C++ floating-point algorithm all the way to optimized RTL using Catapult High-Level Synthesis.
Video 0: Floating point C++ Algorithm to Optimized RTL Implementation Using Catapult High Level Synthesis
This video provides an introduction to the Edge Detection video series and an overview of the Catapult HLS flow.
Video 1: Going From Algorithm to Optimized Implementation Using High-Level Synthesis (HLS)
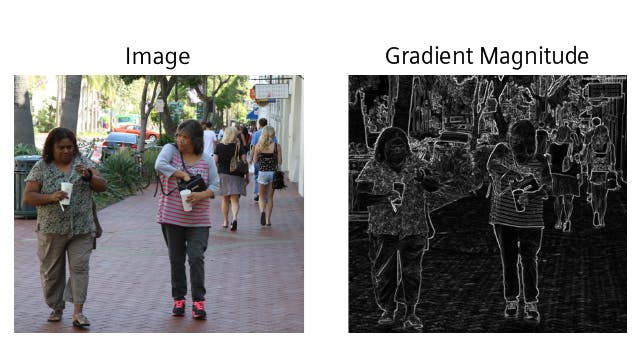
This video provides an overview of the edge detection image processing algorithm used for all of the design walkthroughs in this video series.
Video 2: Using Bit Accurate Datatypes
In this video the edge detection algorithm is converted to use bit-accurate data types.
Video 3: Making the C++ Synthesizable
In this video the bit-accurate model is modified so that it is synthesizable by Catapult. Catapult is then used to optimize the design and analyze performance bottlenecks.
Video 4: Sliding Window Memory Architecture for Performance
In this video the design is recoded to improve performance by adding a sliding window memory architecture. Automated verification is then run on the design and test bench.
Video 5: Multi-block Concurrency for Highest Performance
In this video the design is recoded to further improve performance by coding each design class so that it will be synthesized as a separate concurrent process.
Video 6: Converting from Dual Port to Single Port Memory
This video shows how to recode the C++ so that only single port memories are required to achieve the performance requirements.
Video 7: Making the Hardware Configurable
In this video the C++ is modified to make the synthesized hardware reconfigurable.
Video 8: Circular Buffer Memory Architecture for Reducing Power
This video recodes the C++ to use a circular buffer memory architecture and demonstrates the Catapult power analysis flow.
Video Modules Overview
The video modules are broken down into the following nine categories: We start first with a basic overview of the Catapult flow using a simple design. Module 1 provides an overview of the edge detection algorithm. In module 2 we convert the floating-point algorithm to use bit-accurate data types. Module 3 then makes the algorithm synthesizable. Module 4 uses a sliding window memory architecture in order to improve performance. In module 5 we add multi-block concurrency to achieve the highest performance. Module 6 consists of converting from a dual port to a single port memory architecture. Module 7 involves making the hardware more configurable. In module 8 we finish up by converting the memory architecture to use a circular buffer memory architecture to reduce power.
If you would like to step through this design you can do so by downloading this file here.
主讲嘉宾简介
.jpg?auto=format,compress)
Michael Fingeroff
HLS Technologist
Michael Fingeroff has worked as an HLS Technologist for the Catapult High-Level Synthesis Platform at Siemens Digital Industries Software since 2002. His areas of interest include Machine Learning, DSP, and high-performance video hardware. Prior to working for Siemens Digital Industries Software, he worked as a hardware design engineer developing real-time broadband video systems. Mike Fingeroff received both his bachelor's and master's degrees in electrical engineering from Temple University in 1990 and 1995 respectively.
相关资源

什么是 PLM?为何选择云端 PLM?
什么是 PLM?了解快速、实惠的西门子云端 Teamcenter X 如何帮助更快将创新产品推向市场。了解更多信息。

减少时间浪费及提高工程工作效率的商业价值
中小企业可以减少工程时间浪费,扩大业务或提高利润率。Tech-Clarity 的研究结果。