Edge Detection Walkthrough Video Series
The following 9-part video series provides a step-by-step walkthrough of what is needed to take a C++ floating-point algorithm all the way to optimized RTL using Catapult High-Level Synthesis.
Video 0: Floating point C++ Algorithm to Optimized RTL Implementation Using Catapult High Level Synthesis
This video provides an introduction to the Edge Detection video series and an overview of the Catapult HLS flow.
Video 1: Going From Algorithm to Optimized Implementation Using High-Level Synthesis (HLS)
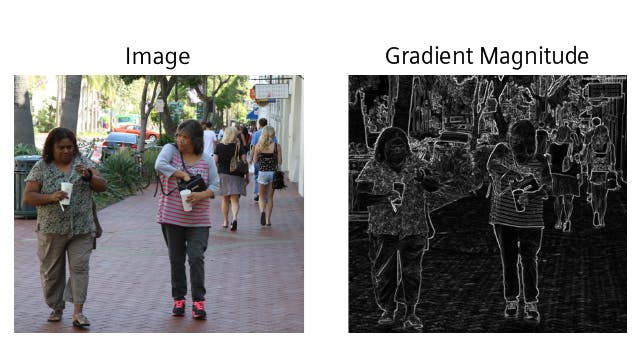
This video provides an overview of the edge detection image processing algorithm used for all of the design walkthroughs in this video series.
Video 2: Using Bit Accurate Datatypes
In this video the edge detection algorithm is converted to use bit-accurate data types.
Video 3: Making the C++ Synthesizable
In this video the bit-accurate model is modified so that it is synthesizable by Catapult. Catapult is then used to optimize the design and analyze performance bottlenecks.
Video 4: Sliding Window Memory Architecture for Performance
In this video the design is recoded to improve performance by adding a sliding window memory architecture. Automated verification is then run on the design and test bench.
Video 5: Multi-block Concurrency for Highest Performance
In this video the design is recoded to further improve performance by coding each design class so that it will be synthesized as a separate concurrent process.
Video 6: Converting from Dual Port to Single Port Memory
This video shows how to recode the C++ so that only single port memories are required to achieve the performance requirements.
Video 7: Making the Hardware Configurable
In this video the C++ is modified to make the synthesized hardware reconfigurable.
Video 8: Circular Buffer Memory Architecture for Reducing Power
This video recodes the C++ to use a circular buffer memory architecture and demonstrates the Catapult power analysis flow.
Video Modules Overview
The video modules are broken down into the following nine categories: We start first with a basic overview of the Catapult flow using a simple design. Module 1 provides an overview of the edge detection algorithm. In module 2 we convert the floating-point algorithm to use bit-accurate data types. Module 3 then makes the algorithm synthesizable. Module 4 uses a sliding window memory architecture in order to improve performance. In module 5 we add multi-block concurrency to achieve the highest performance. Module 6 consists of converting from a dual port to a single port memory architecture. Module 7 involves making the hardware more configurable. In module 8 we finish up by converting the memory architecture to use a circular buffer memory architecture to reduce power.
If you would like to step through this design you can do so by downloading this file here.
발표자 소개
.jpg?auto=format,compress)
Michael Fingeroff
HLS Technologist
Michael Fingeroff has worked as an HLS Technologist for the Catapult High-Level Synthesis Platform at Siemens Digital Industries Software since 2002. His areas of interest include Machine Learning, DSP, and high-performance video hardware. Prior to working for Siemens Digital Industries Software, he worked as a hardware design engineer developing real-time broadband video systems. Mike Fingeroff received both his bachelor's and master's degrees in electrical engineering from Temple University in 1990 and 1995 respectively.
관련 자료

디지털 혁신: Siemens EDA를 통해 더 스마트한 미래를 더 빠르게 설계할 수 있는 방법
Siemens EDA는 더 많은 기업이 디지털 혁신을 추진하고 더 스마트한 미래를 더 빨리 설계할 수 있도록 최선을 다해 돕고 있습니다.

IC Design: 차세대 노드에 대비하기
차세대 노드를 준비하기 이해서는 헌신적인 노력이 필요합니다. Siemens EDA에서 “차세대 노드”의 물리적 검증 난제를 해결하고 성능을 개선하게 위한 Calibre nmPlatform을 준비하기 위해 어떤 노력을 하고 있는지 살펴봅니다.