マルチロボットのモーション・プランニングとインターロッキングを加速
自動車製造のロボティクスで人工知能を活用
自動車業界には今、変革の嵐が吹き荒れています。強力なデジタル技術は、自動運転ソリューションの高い需要を支え、既存の自動車開発を刷新しようとしています。人工知能(AI)に対応したスマート・コネクテッドカーは、自動車メーカーに大きなチャンスをもたらすと同時に、課題も突き付けています。
Realtime Roboticsの新しいソフトウェア・コントローラーと、シーメンスのTecnomatix Process Simulateソフトウェアを統合すると、ロボット・オペレーションのエンジニアリング時間を最大80%短縮できます。このウェビナーを視聴して、自動車製造のロボット・プログラミング作業を簡素化する方法を見つけましょう。完全なキネマティクス3Dモデルを使用して製造プロセスのシーケンスを作成、再利用、検証、最適化する方法を学びます。
モーション・プランニングとインターロッキングに費やす時間を削減
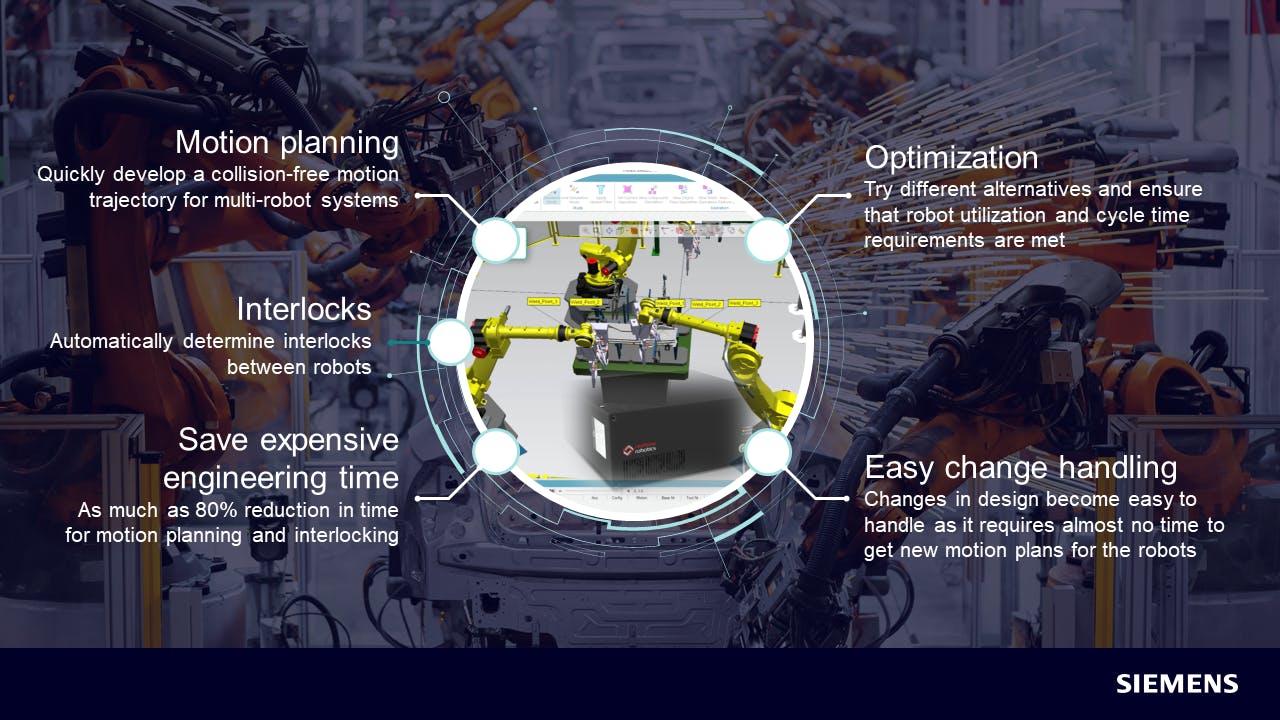
サイクル時間を最小限に抑えながら、衝突しないロボットのモーション部品を開発することは簡単ではありません。設計変更は、ドミノ効果を引き起こす可能性があります。RTRとも呼ばれるリアルタイム・ロボティクスは、モーション・プランをリアルタイムで自動作成します。ロボット・プログラミング作業は、完全自動のインターロッキングで簡素化できます。これで干渉ゾーンを縮小し、計画されたモーションパスをロボットが移動する際に占有するスペースを減らせます。
ロボット間のインターロックを自動で決定
ロボット間のインターロックは、RTRコンポーネントによってオンザフライで特定され、解決されます。このテクノロジーを使用することで、エンジニアリング時間が約70~80%短縮することが明らかになっています。ユーザーは変更が発生するたびにモーションを再プログラムする必要がないため、非常に簡単に変更対応できます。Realtime Robotics RapidPlanソフトウェアがロボットの動きを計画します。
RTR Rapidplanでロボットのモーションをシミュレーションして、衝突の発生しない動きかどうかを検証
Tecnomatixのロボティクスおよび自動シミュレーション・ソリューションは、完全な製造セルおよびシステムをシミュレーションする能力を提供します。これにより、時間ベースとイベントベースの両方のシミュレーション手法を使って、衝突の発生しないロボットのパスを設計、検証し、ロボットのモーションとサイクル時間を最適化します。
このウェビナーでは、複数レベルのロボット・シミュレーションとワークステーション開発に対応するシーメンスのロボティクス・ソリューションを使用してエラーを削減し、自動システムをはるかに速くオンラインへ移行する方法を紹介します。
講演者の紹介

ユバル・ヘラー
製造製品管理
ユバルは、CAxで24年の経験があります。2007年にTecnomatix Process Simulateの製品マネージャーとしてシーメンスに入社し、その後ディレクターとなりました。現在は、Tecnomatix Process SimulateおよびProcess Designer製品ラインを担当するチームを統括し、デジタル製造事業部でクラウドベース・シミュレーション・ソリューションのイノベーションを進めています。